بسمه تعالي کنترل صنعتي 2 دکتر سید مجید اسما عیل زاده گروه کنترل دانشکده مهندسي برق دانشگاه علم و صنعت ایران پاییس 90
|
|
|
- Noel Holmes
- 5 years ago
- Views:
Transcription

1 بسمه تعالي کنترل صنعتي 2 دکتر سید مجید اسما عیل زاده گروه کنترل دانشکده مهندسي برق دانشگاه علم و صنعت ایران پاییس 90




2 Techniques of Model-Based Control By Coleman Brosilow, Babu Joseph Publisher : Prentice Hall PTR Pub Date : April 03, 2002 ISBN : X Pages : 704
3

4
5
6

7
8

9
10 Illustrative Example: Blending system Notation: w 1, w 2 and w are mass flow rates x 1, x 2 and x are mass fractions of component A
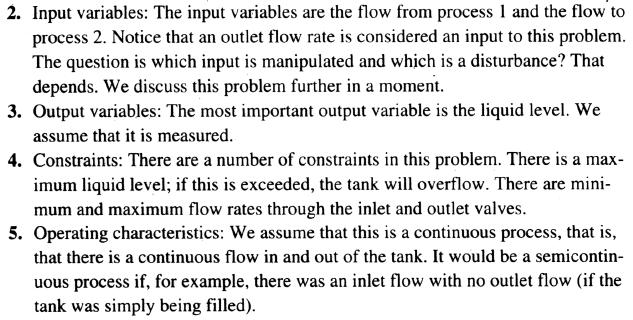
11 Assumptions: 1. w 1 is constant 2. x 2 = constant = 1 (stream 2 is pure A) 3. Perfect mixing in the tank Control Objective: Keep x at a desired value (or set point ) x sp, despite variations in x 1 (t). Flow rate w 2 can be adjusted for this purpose. Terminology: Controlled variable (or output variable ): x Manipulated variable (or input variable ): w 2 Disturbance variable (or load variable ): x 1
12 Design Question. What value of x x SP? w 2 is required to have Overall balance: Component A balance: 0 w w w (1-1) 1 2 w1 x1 w2 x2 wx 0 (1-2) (The overbars denote nominal steady-state design values.) x x SP At the design conditions,. Substitute Eq. 1-2, SPand x2 1, then solve Eq. 1-2 for w 2 : xsp x1 w2 w1 (1-3) 1 x SP x x
13 Equation 1-3 is the design equation for the blending system. If our assumptions are correct, then this value of w 2 will keep x at xsp. But what if conditions change? Control Question. Suppose that the inlet concentration x 1 changes with time. How can we ensure that x remains at or near the set point x SP? As a specific example, if x1 x1 and w2 w2, then x > x SP. Some Possible Control Strategies: Method 1. Measure x and adjust w 2. Intuitively, if x is too high, we should reduce w 2 ;
14 Manual control vs. automatic control Proportional feedback control law, w2 t w2 Kc x SP x t (1-4) 1. where K c is called the controller gain. 2. w 2 (t) and x(t) denote variables that change with time t. 3. The change in the flow rate, w 2 t w 2 is, proportional to the deviation from the set point, x SP x(t).
15
16 Method 2. Measure x 1 and adjust w 2. Thus, if x 1 is greater than x 1, we would decrease w 2 so that w w 2 2 ; One approach: Consider Eq. (1-3) and replace x1 and w2with x 1 (t) and w 2 (t) to get a control law: 1 xsp x t w2 t w1 (1-5) 1 x SP
17
18 Because Eq. (1-3) applies only at steady state, it is not clear how effective the control law in (1-5) will be for transient conditions. Method 3. Measure x 1 and x, adjust w 2. This approach is a combination of Methods 1 and 2. Method 4. Use a larger tank. If a larger tank is used, fluctuations in x 1 will tend to be damped out due to the larger capacitance of the tank contents. However, a larger tank means an increased capital cost.
19 1.2 Classification of Control Strategies Method Table. 1.1 Control Strategies for the Blending System Measured Variable Manipulated Variable Category 1 x w 2 FB a 2 x 1 w 2 FF 3 x 1 and x w 2 FF/FB Design change Feedback Control: Distinguishing feature: measure the controlled variable
20 Very oscillatory responses, or even instability It is important to make a distinction between negative feedback and positive feedback. Engineering Usage vs. Social Sciences Advantages: Corrective action is taken regardless of the source of the disturbance. Reduces sensitivity of the controlled variable to disturbances and changes in the process (shown later). Disadvantages: No corrective action occurs until after the disturbance has upset the process, that is, until after x differs from x sp.
21 Feedforward Control: Distinguishing feature: measure a disturbance variable Advantage: Correct for disturbance before it upsets the process. Disadvantage: Must be able to measure the disturbance. No corrective action for unmeasured disturbances.

22

23

24
25
26

27
28

29

30
31

32
33
34
35

36
37

38
39

40
41
42
43

44


45
46

47

48
49
50


51 Process Modelling


52 Process Modelling
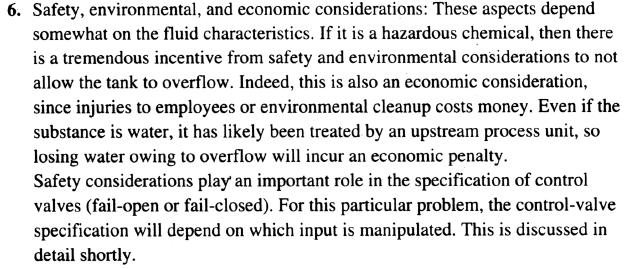
53 Development of Dynamic Models Illustrative Example: A Blending Process An unsteady-state mass balance for the blending system: rate of accumulation rate of rate of of mass in the tank mass in mass out (2-1)
54 or where w 1, w 2, and w are mass flow rates. d Vρ dt w w w 1 2 (2-2) The unsteady-state component balance is: d Vρx dt w x w x wx (2-3) The corresponding steady-state model was derived in Ch. 1 (cf. Eqs. 1-1 and 1-2). 0 w w w (2-4) w x w x wx (2-5)

55
56 General Modeling Principles The model equations are at best an approximation to the real process. Adage: All models are wrong, but some are useful. Modeling inherently involves a compromise between model accuracy and complexity on one hand, and the cost and effort required to develop the model, on the other hand. Process modeling is both an art and a science. Creativity is required to make simplifying assumptions that result in an appropriate model. Dynamic models of processes consist of ordinary differential equations (ODE) and/or partial differential equations (PDE), plus related algebraic equations. 56
57 Table 2.1. A Systematic Approach for Developing Dynamic Models 1. State the modeling objectives and the end use of the model. They determine the required levels of model detail and model accuracy. 2. Draw a schematic diagram of the process and label all process variables. 3. List all of the assumptions that are involved in developing the model. Try for parsimony; the model should be no more complicated than necessary to meet the modeling objectives. 4. Determine whether spatial variations of process variables are important. If so, a partial differential equation model will be required. 5. Write appropriate conservation equations (mass, component, energy, and so forth). 57
58 Table 2.1. (continued) 6. Introduce equilibrium relations and other algebraic equations (from thermodynamics, transport phenomena, chemical kinetics, equipment geometry, etc.). 7. Perform a degrees of freedom analysis (Section 2.3) to ensure that the model equations can be solved. 8. Simplify the model. It is often possible to arrange the equations so that the dependent variables (outputs) appear on the left side and the independent variables (inputs) appear on the right side. This model form is convenient for computer simulation and subsequent analysis. 9. Classify inputs as disturbance variables or as manipulated variables. 58
59 Modeling Approaches Physical/chemical (fundamental, global) Model structure by theoretical analysis Material/energy balances Heat, mass, and momentum transfer Thermodynamics, chemical kinetics Physical property relationships Model complexity must be determined (assumptions) Can be computationally expensive (not real-time) May be expensive/time-consuming to obtain Good for extrapolation, scale-up Does not require experimental data to obtain (data required for validation and fitting)
60 Black box (empirical) Large number of unknown parameters Can be obtained quickly (e.g., linear regression) Model structure is subjective Dangerous to extrapolate Semi-empirical Compromise of first two approaches Model structure may be simpler Typically 2 to 10 physical parameters estimated (nonlinear regression) Good versatility, can be extrapolated Can be run in real-time
61 linear regression y c 2 0 c1x c2x nonlinear regression y K 1 e t / number of parameters affects accuracy of model, but confidence limits on the parameters fitted must be evaluated objective function for data fitting minimize sum of squares of errors between data points and model predictions (use optimization code to fit parameters) nonlinear models such as neural nets are becoming popular (automatic modeling)
62 Conservation Laws Theoretical models of chemical processes are based on conservation laws. Conservation of Mass rate of mass rate of mass rate of mass accumulation in out (2-6) Conservation of Component i rate of component i rate of component i accumulation in rate of component i rate of component i out produced 62 (2-7)
63 Conservation of Energy The general law of energy conservation is also called the First Law of Thermodynamics. It can be expressed as: rate of energy rate of energy in rate of energy out accumulation by convection by convection net rate of heat addition to the system from the surroundings net rate of work performed on the system (2-8) by the surroundings The total energy of a thermodynamic system, U tot, is the sum of its internal energy, kinetic energy, and potential energy: Utot Uint UKE UPE (2-9) 63
64 For the processes and examples considered, it is appropriate to make two assumptions: 1. Changes in potential energy and kinetic energy can be neglected because they are small in comparison with changes in internal energy. 2. The net rate of work can be neglected because it is small compared to the rates of heat transfer and convection. For these reasonable assumptions, the energy balance in Eq. 2-8 can be written as du int wh Q dt (2-10) U int H w Q the internal energy of the system enthalpy per unit mass mass flow rate rate of heat transfer to the system 64 denotes the difference between outlet and inlet conditions of the flowing streams; therefore -Δ wh = rate of enthalpy of the inlet stream(s) - the enthalpy of the outlet stream(s)
65 The analogous equation for molar quantities is, du int wh Q dt (2-11) where H is the enthalpy per mole and w is the molar flow rate. In order to derive dynamic models of processes from the general energy balances in Eqs and 2-11, expressions for U int and Ĥ or H are required, which can be derived from thermodynamics.
66 The Blending Process Revisited For constant, Eqs. 2-2 and 2-3 become: dv w1 w2 w (2-12) dt d Vx dt w1 x1 w2 x2 wx (2-13)
67 Equation 2-13 can be simplified by expanding the accumulation term using the chain rule for differentiation of a product: d Vx dx dv V x dt dt dt Substitution of (2-14) into (2-13) gives: (2-14) dx dv V x w1 x1 w2 x2 wx (2-15) dt dt Substitution of the mass balance in (2-12) for dv/ dt in (2-15) gives: dx V x w1 w2 w w1 x1 w2 x2 wx (2-16) dt After canceling common terms and rearranging (2-12) and (2-16), a more convenient model form is obtained: dv 1 w1 w2 w (2-17) dt dx w1 w2 1 2 dt V V x x x x (2-18)

68
69

70
71
72
73
Development of Dynamic Models. Chapter 2. Illustrative Example: A Blending Process
 Development of Dynamic Models Illustrative Example: A Blending Process An unsteady-state mass balance for the blending system: rate of accumulation rate of rate of = of mass in the tank mass in mass out
Development of Dynamic Models Illustrative Example: A Blending Process An unsteady-state mass balance for the blending system: rate of accumulation rate of rate of = of mass in the tank mass in mass out
Mathematical Modeling of Chemical Processes. Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University
 Mathematical Modeling of Chemical Processes Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University Chapter Objectives End of this chapter, you should be
Mathematical Modeling of Chemical Processes Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University Chapter Objectives End of this chapter, you should be
Development of Dynamic Models. Chapter 2. Illustrative Example: A Blending Process
 Development of Dynamic Models Illustrative Example: A Blending Process An unsteady-state mass balance for the blending system: rate of accumulation rate of rate of = of mass in the tank mass in mass out
Development of Dynamic Models Illustrative Example: A Blending Process An unsteady-state mass balance for the blending system: rate of accumulation rate of rate of = of mass in the tank mass in mass out
Theoretical Models of Chemical Processes
 Theoretical Models of Chemical Processes Dr. M. A. A. Shoukat Choudhury 1 Rationale for Dynamic Models 1. Improve understanding of the process 2. Train Plant operating personnel 3. Develop control strategy
Theoretical Models of Chemical Processes Dr. M. A. A. Shoukat Choudhury 1 Rationale for Dynamic Models 1. Improve understanding of the process 2. Train Plant operating personnel 3. Develop control strategy
ChE 6303 Advanced Process Control
 ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
Modelling and linearization. Mathematical Modeling of Chemical Processes
 Modelling and linearization Seborg: Chapter 2 + 3.4 (lin.) Skogestad: Ch. 11 Mathematical Modeling of Chemical Processes Chapter 2 Mathematical Model (Eykhoff, 1974) a representation of the essential aspects
Modelling and linearization Seborg: Chapter 2 + 3.4 (lin.) Skogestad: Ch. 11 Mathematical Modeling of Chemical Processes Chapter 2 Mathematical Model (Eykhoff, 1974) a representation of the essential aspects
Class 27: Block Diagrams
 Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Nonlinear System Analysis
 Nonlinear System Analysis Lyapunov Based Approach Lecture 4 Module 1 Dr. Laxmidhar Behera Department of Electrical Engineering, Indian Institute of Technology, Kanpur. January 4, 2003 Intelligent Control
Nonlinear System Analysis Lyapunov Based Approach Lecture 4 Module 1 Dr. Laxmidhar Behera Department of Electrical Engineering, Indian Institute of Technology, Kanpur. January 4, 2003 Intelligent Control
The reaction whose rate constant we are to find is the forward reaction in the following equilibrium. NH + 4 (aq) + OH (aq) K b.
 + OH (aq) K b.") THE RATES OF CHEMICAL REACTIONS 425 E22.3a The reaction for which pk a is 9.25 is NH + 4 aq + H 2Ol NH 3 aq + H 3 O + aq. The reaction whose rate constant we are to find is the forward reaction in the
THE RATES OF CHEMICAL REACTIONS 425 E22.3a The reaction for which pk a is 9.25 is NH + 4 aq + H 2Ol NH 3 aq + H 3 O + aq. The reaction whose rate constant we are to find is the forward reaction in the
Spring 2006 Process Dynamics, Operations, and Control Lesson 5: Operability of Processes
 5.0 context and direction In esson 4, we encountered instability. We think of stability as a mathematical property of our linear system models. Now we will embed this mathematical notion within the practical
5.0 context and direction In esson 4, we encountered instability. We think of stability as a mathematical property of our linear system models. Now we will embed this mathematical notion within the practical
Solutions for Tutorial 3 Modelling of Dynamic Systems
 Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Use of Differential Equations In Modeling and Simulation of CSTR
 Use of Differential Equations In Modeling and Simulation of CSTR JIRI VOJTESEK, PETR DOSTAL Department of Process Control, Faculty of Applied Informatics Tomas Bata University in Zlin nám. T. G. Masaryka
Use of Differential Equations In Modeling and Simulation of CSTR JIRI VOJTESEK, PETR DOSTAL Department of Process Control, Faculty of Applied Informatics Tomas Bata University in Zlin nám. T. G. Masaryka
IV. Transport Phenomena Lecture 18: Forced Convection in Fuel Cells II
 IV. Transport Phenomena Lecture 18: Forced Convection in Fuel Cells II MIT Student (and MZB) As discussed in the previous lecture, we are interested in forcing fluid to flow in a fuel cell in order to
IV. Transport Phenomena Lecture 18: Forced Convection in Fuel Cells II MIT Student (and MZB) As discussed in the previous lecture, we are interested in forcing fluid to flow in a fuel cell in order to
DESIGN AND CONTROL OF BUTYL ACRYLATE REACTIVE DISTILLATION COLUMN SYSTEM. I-Lung Chien and Kai-Luen Zeng
 DESIGN AND CONTROL OF BUTYL ACRYLATE REACTIVE DISTILLATION COLUMN SYSTEM I-Lung Chien and Kai-Luen Zeng Department of Chemical Engineering, National Taiwan University of Science and Technology, Taipei
DESIGN AND CONTROL OF BUTYL ACRYLATE REACTIVE DISTILLATION COLUMN SYSTEM I-Lung Chien and Kai-Luen Zeng Department of Chemical Engineering, National Taiwan University of Science and Technology, Taipei
3. Mathematical Modelling
 3. Mathematical Modelling 3.1 Modelling principles 3.1.1 Model types 3.1.2 Model construction 3.1.3 Modelling from first principles 3.2 Models for technical systems 3.2.1 Electrical systems 3.2.2 Mechanical
3. Mathematical Modelling 3.1 Modelling principles 3.1.1 Model types 3.1.2 Model construction 3.1.3 Modelling from first principles 3.2 Models for technical systems 3.2.1 Electrical systems 3.2.2 Mechanical
Laboratory Exercise 1 DC servo
 Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Process Control, 3P4 Assignment 6
 Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
Reactor Design within Excel Enabled by Rigorous Physical Properties and an Advanced Numerical Computation Package
 Reactor Design within Excel Enabled by Rigorous Physical Properties and an Advanced Numerical Computation Package Mordechai Shacham Department of Chemical Engineering Ben Gurion University of the Negev
Reactor Design within Excel Enabled by Rigorous Physical Properties and an Advanced Numerical Computation Package Mordechai Shacham Department of Chemical Engineering Ben Gurion University of the Negev
AME 513. " Lecture 7 Conservation equations
 AME 51 Principles of Combustion Lecture 7 Conservation equations Outline Conservation equations Mass Energy Chemical species Momentum 1 Conservation of mass Cubic control volume with sides dx, dy, dz u,
AME 51 Principles of Combustion Lecture 7 Conservation equations Outline Conservation equations Mass Energy Chemical species Momentum 1 Conservation of mass Cubic control volume with sides dx, dy, dz u,
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Chapter 1. Introduction to Nonlinear Space Plasma Physics
 Chapter 1. Introduction to Nonlinear Space Plasma Physics The goal of this course, Nonlinear Space Plasma Physics, is to explore the formation, evolution, propagation, and characteristics of the large
Chapter 1. Introduction to Nonlinear Space Plasma Physics The goal of this course, Nonlinear Space Plasma Physics, is to explore the formation, evolution, propagation, and characteristics of the large
Lab Project 4a MATLAB Model of Oscillatory Flow
 Lab Project 4a MATLAB Model of Oscillatory Flow Goals Prepare analytical and computational solutions for transient flow between the two upright arms of a U-shaped tube Compare the theoretical solutions
Lab Project 4a MATLAB Model of Oscillatory Flow Goals Prepare analytical and computational solutions for transient flow between the two upright arms of a U-shaped tube Compare the theoretical solutions
Queen s University at Kingston. CHEE Winter Process Dynamics and Control. M. Guay. Quiz 1
 Queen s University at Kingston CHEE 319 - Winter 2011 Process Dynamics and Control M. Guay Quiz 1 Instructions: 1. This is a 50 minute examination. 2. Please write your student number instead of your name
Queen s University at Kingston CHEE 319 - Winter 2011 Process Dynamics and Control M. Guay Quiz 1 Instructions: 1. This is a 50 minute examination. 2. Please write your student number instead of your name
AA210A Fundamentals of Compressible Flow. Chapter 1 - Introduction to fluid flow
 AA210A Fundamentals of Compressible Flow Chapter 1 - Introduction to fluid flow 1 1.2 Conservation of mass Mass flux in the x-direction [ ρu ] = M L 3 L T = M L 2 T Momentum per unit volume Mass per unit
AA210A Fundamentals of Compressible Flow Chapter 1 - Introduction to fluid flow 1 1.2 Conservation of mass Mass flux in the x-direction [ ρu ] = M L 3 L T = M L 2 T Momentum per unit volume Mass per unit
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year
 BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
Introduction to the course ``Theory and Development of Reactive Systems'' (Chemical Reaction Engineering - I)
") Introduction to the course ``Theory and Development of Reactive Systems'' (Chemical Reaction Engineering - I) Prof. Gabriele Pannocchia Department of Civil and Industrial Engineering (DICI) University
Introduction to the course ``Theory and Development of Reactive Systems'' (Chemical Reaction Engineering - I) Prof. Gabriele Pannocchia Department of Civil and Industrial Engineering (DICI) University
5. Coupling of Chemical Kinetics & Thermodynamics
 5. Coupling of Chemical Kinetics & Thermodynamics Objectives of this section: Thermodynamics: Initial and final states are considered: - Adiabatic flame temperature - Equilibrium composition of products
5. Coupling of Chemical Kinetics & Thermodynamics Objectives of this section: Thermodynamics: Initial and final states are considered: - Adiabatic flame temperature - Equilibrium composition of products
1/r plots: a brief reminder
 L10-1 1/r plots: a brief reminder 1/r X target X L10-2 1/r plots: a brief reminder 1/r X target X L10-3 1/r plots: a brief reminder 1/r X target X Special Case: utocatalytic Reactions Let s assume a reaction
L10-1 1/r plots: a brief reminder 1/r X target X L10-2 1/r plots: a brief reminder 1/r X target X L10-3 1/r plots: a brief reminder 1/r X target X Special Case: utocatalytic Reactions Let s assume a reaction
Chapter 8. Feedback Controllers. Figure 8.1 Schematic diagram for a stirred-tank blending system.
 Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Advanced Chemical Reaction Engineering Prof. H. S. Shankar Department of Chemical Engineering IIT Bombay. Lecture - 03 Design Equations-1
 (Refer Slide Time: 00:19) Advanced Chemical Reaction Engineering Prof. H. S. Shankar Department of Chemical Engineering IIT Bombay Lecture - 03 Design Equations-1 We are looking at advanced reaction engineering;
(Refer Slide Time: 00:19) Advanced Chemical Reaction Engineering Prof. H. S. Shankar Department of Chemical Engineering IIT Bombay Lecture - 03 Design Equations-1 We are looking at advanced reaction engineering;
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Control Systems I. Lecture 2: Modeling and Linearization. Suggested Readings: Åström & Murray Ch Jacopo Tani
 Control Systems I Lecture 2: Modeling and Linearization Suggested Readings: Åström & Murray Ch. 2-3 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 28, 2018 J. Tani, E.
Control Systems I Lecture 2: Modeling and Linearization Suggested Readings: Åström & Murray Ch. 2-3 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 28, 2018 J. Tani, E.
A First Course on Kinetics and Reaction Engineering Unit 22. Analysis of Steady State CSTRs
 Unit 22. Analysis of Steady State CSRs Overview Reaction engineering involves constructing an accurate mathematical model of a real world reactor and then using that model to perform an engineering task
Unit 22. Analysis of Steady State CSRs Overview Reaction engineering involves constructing an accurate mathematical model of a real world reactor and then using that model to perform an engineering task
Introduction & Basic Concepts of Thermodynamics
 Introduction & Basic Concepts of Thermodynamics Reading Problems 2-1 2-8 2-53, 2-67, 2-85, 2-96 Introduction to Thermal Sciences Thermodynamics Conservation of mass Conservation of energy Second law of
Introduction & Basic Concepts of Thermodynamics Reading Problems 2-1 2-8 2-53, 2-67, 2-85, 2-96 Introduction to Thermal Sciences Thermodynamics Conservation of mass Conservation of energy Second law of
Chemical Reaction Engineering II Prof. A. K. Suresh Department of Chemical Engineering Indian Institute of Technology, Bombay
 Chemical Reaction Engineering II Prof A K Suresh Department of Chemical Engineering Indian Institute of Technology, Bombay Lecture - 24 GLR-5: Transition to Instantaneous reaction; Reaction regimes in
Chemical Reaction Engineering II Prof A K Suresh Department of Chemical Engineering Indian Institute of Technology, Bombay Lecture - 24 GLR-5: Transition to Instantaneous reaction; Reaction regimes in
CONSIM - MS EXCEL BASED STUDENT FRIENDLY SIMULATOR FOR TEACHING PROCESS CONTROL THEORY
 CONSIM - MS EXCEL BASED STUDENT FRIENDLY SIMULATOR FOR TEACHING PROCESS CONTROL THEORY S. Lakshminarayanan, 1 Rao Raghuraj K 1 and S. Balaji 1 1 Department of Chemical and Biomolecular Engineering, 4 Engineering
CONSIM - MS EXCEL BASED STUDENT FRIENDLY SIMULATOR FOR TEACHING PROCESS CONTROL THEORY S. Lakshminarayanan, 1 Rao Raghuraj K 1 and S. Balaji 1 1 Department of Chemical and Biomolecular Engineering, 4 Engineering
Thermodynamics revisited
 Thermodynamics revisited How can I do an energy balance for a reactor system? 1 st law of thermodynamics (differential form): de de = = dq dq--dw dw Energy: de = du + de kin + de pot + de other du = Work:
Thermodynamics revisited How can I do an energy balance for a reactor system? 1 st law of thermodynamics (differential form): de de = = dq dq--dw dw Energy: de = du + de kin + de pot + de other du = Work:
Numerical Analysis Module 1 Abstract Equation Forms in Process Modeling
 Numerical Analysis Module 1 Abstract Equation Forms in Process Modeling Sachin C. Patwardhan Dept. of Chemical Engineering, Indian Institute of Technology, Bombay Powai, Mumbai, 400 076, Inda. Email: sachinp@iitb.ac.in
Numerical Analysis Module 1 Abstract Equation Forms in Process Modeling Sachin C. Patwardhan Dept. of Chemical Engineering, Indian Institute of Technology, Bombay Powai, Mumbai, 400 076, Inda. Email: sachinp@iitb.ac.in
Chemical reactors. H has thermal contribution, pressure contribution (often negligible) and reaction contribution ( source - like)
 and reaction contribution ( source - like)") Chemical reactors - chemical transformation of reactants into products Classification: a) according to the type of equipment o batch stirred tanks small-scale production, mostly liquids o continuous stirred
Chemical reactors - chemical transformation of reactants into products Classification: a) according to the type of equipment o batch stirred tanks small-scale production, mostly liquids o continuous stirred
Solutions for Tutorial 4 Modelling of Non-Linear Systems
 Solutions for Tutorial 4 Modelling of Non-Linear Systems 4.1 Isothermal CSTR: The chemical reactor shown in textbook igure 3.1 and repeated in the following is considered in this question. The reaction
Solutions for Tutorial 4 Modelling of Non-Linear Systems 4.1 Isothermal CSTR: The chemical reactor shown in textbook igure 3.1 and repeated in the following is considered in this question. The reaction
Chemical Reaction Engineering Lecture 5
 Chemical Reaction Engineering g Lecture 5 The Scope The im of the Course: To learn how to describe a system where a (bio)chemical reaction takes place (further called reactor) Reactors Pharmacokinetics
Chemical Reaction Engineering g Lecture 5 The Scope The im of the Course: To learn how to describe a system where a (bio)chemical reaction takes place (further called reactor) Reactors Pharmacokinetics
Chapter a. Spring constant, k : The change in the force per unit length change of the spring. b. Coefficient of subgrade reaction, k:
 Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Introduction to Turbomachinery
 1. Coordinate System Introduction to Turbomachinery Since there are stationary and rotating blades in turbomachines, they tend to form a cylindrical form, represented in three directions; 1. Axial 2. Radial
1. Coordinate System Introduction to Turbomachinery Since there are stationary and rotating blades in turbomachines, they tend to form a cylindrical form, represented in three directions; 1. Axial 2. Radial
The simplified model now consists only of Eq. 5. Degrees of freedom for the simplified model: 2-1
 . a) Overall mass balance: d( ρv ) Energy balance: = w + w w () d V T Tref C = wc ( T Tref ) + wc( T Tref ) w C T Because ρ = constant and ( Tref ) V = V = constant, Eq. becomes: () w = + () w w b) From
. a) Overall mass balance: d( ρv ) Energy balance: = w + w w () d V T Tref C = wc ( T Tref ) + wc( T Tref ) w C T Because ρ = constant and ( Tref ) V = V = constant, Eq. becomes: () w = + () w w b) From
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Optimizing Control of Petlyuk Distillation: Understanding the Steady-State Behavior
 Optimizing Control of Petlyuk Distillation: Understanding the Steady-State Behavior Ivar J. Halvorsen and Sigurd Skogestad Abstract. Norwegian University of Science and Technology, Department of Chemical
Optimizing Control of Petlyuk Distillation: Understanding the Steady-State Behavior Ivar J. Halvorsen and Sigurd Skogestad Abstract. Norwegian University of Science and Technology, Department of Chemical
Introduction to Process Control. Lecture 1, 2016/2017 Control & System Eng. Dept., 4 th year Subject: Process Control. Dr. Safanah M.
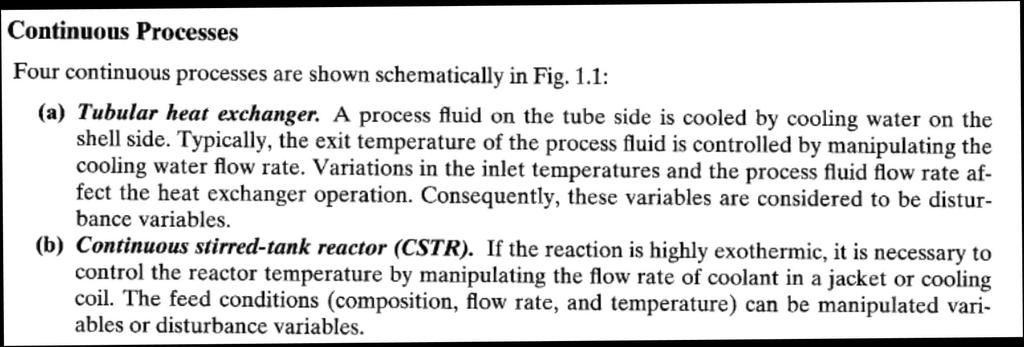
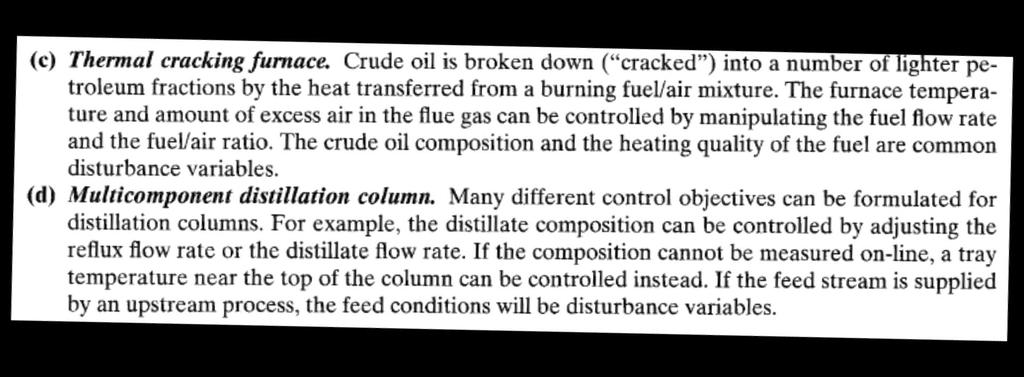
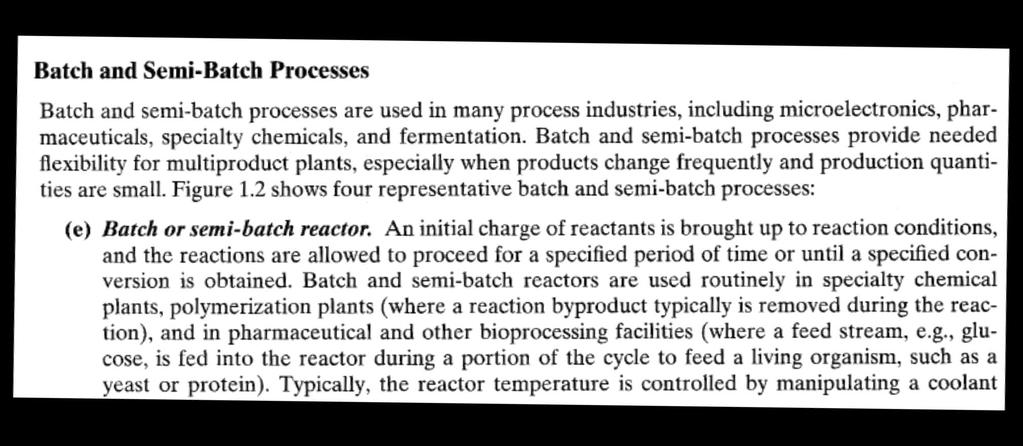
 Introduction to Process Control Lecture 1, 2016/2017 Control & System Eng. Dept., 4 th year Subject: Process Control. Dr. Safanah M. Raafat REPRESENTATIVE PROCESS CONTROL PROBLEMS Process: The conversion
Introduction to Process Control Lecture 1, 2016/2017 Control & System Eng. Dept., 4 th year Subject: Process Control. Dr. Safanah M. Raafat REPRESENTATIVE PROCESS CONTROL PROBLEMS Process: The conversion
D DAVID PUBLISHING. Thermodynamic Equilibrium. 1. Introduction. 2. The Laws of Thermodynamics and Equilibrium. Richard Martin Gibbons
 Journal of Energy and Power Engineering 10 (2016) 623-627 doi: 10.17265/1934-8975/2016.10.006 D DAVID PUBLISHING Richard Martin Gibbons Received: July 07, 2016 / Accepted: July 15, 2016 / Published: October
Journal of Energy and Power Engineering 10 (2016) 623-627 doi: 10.17265/1934-8975/2016.10.006 D DAVID PUBLISHING Richard Martin Gibbons Received: July 07, 2016 / Accepted: July 15, 2016 / Published: October
Process Control Hardware Fundamentals
 Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
MTH210 DIFFERENTIAL EQUATIONS. Dr. Gizem SEYHAN ÖZTEPE
 MTH210 DIFFERENTIAL EQUATIONS Dr. Gizem SEYHAN ÖZTEPE 1 References Logan, J. David. A first course in differential equations. Springer, 2015. Zill, Dennis G. A first course in differential equations with
MTH210 DIFFERENTIAL EQUATIONS Dr. Gizem SEYHAN ÖZTEPE 1 References Logan, J. David. A first course in differential equations. Springer, 2015. Zill, Dennis G. A first course in differential equations with
( ) ( = ) = ( ) ( ) ( )
 ( = ) = ( ) ( ) ( )") ( ) Vρ C st s T t 0 wc Ti s T s Q s (8) K T ( s) Q ( s) + Ti ( s) (0) τs+ τs+ V ρ K and τ wc w T (s)g (s)q (s) + G (s)t(s) i G and G are transfer functions and independent of the inputs, Q and T i. Note
( ) Vρ C st s T t 0 wc Ti s T s Q s (8) K T ( s) Q ( s) + Ti ( s) (0) τs+ τs+ V ρ K and τ wc w T (s)g (s)q (s) + G (s)t(s) i G and G are transfer functions and independent of the inputs, Q and T i. Note
Analyzing Mass and Heat Transfer Equipment
 Analyzing Mass and Heat Transfer Equipment (MHE) Analyzing Mass and Heat Transfer Equipment Scaling up to solving problems using process equipment requires both continuum and macroscopic knowledge of transport,
Analyzing Mass and Heat Transfer Equipment (MHE) Analyzing Mass and Heat Transfer Equipment Scaling up to solving problems using process equipment requires both continuum and macroscopic knowledge of transport,
is to accounting. Arithmetic provides the notation
 221. 20-5 Mathematics - Course 221 THE DERIVATIVE IN SCIENCE AND TECHNOLOGY I Some Common Differential Equations CalculUs is to modern science and technology as arithmetic is to accounting. Arithmetic
221. 20-5 Mathematics - Course 221 THE DERIVATIVE IN SCIENCE AND TECHNOLOGY I Some Common Differential Equations CalculUs is to modern science and technology as arithmetic is to accounting. Arithmetic
Dynamic Modeling of the Solvent Regeneration Part of a CO 2 Capture Plant
 Available online at www.sciencedirect.com Energy Procedia 37 (2013 ) 2058 2065 GHGT-11 Dynamic Modeling of the Solvent Regeneration Part of a CO 2 Capture Plant Nina Enaasen a *, Andrew Tobiesen b, Hanne
Available online at www.sciencedirect.com Energy Procedia 37 (2013 ) 2058 2065 GHGT-11 Dynamic Modeling of the Solvent Regeneration Part of a CO 2 Capture Plant Nina Enaasen a *, Andrew Tobiesen b, Hanne
ECH 4224L Unit Operations Lab I Thin Film Evaporator. Introduction. Objective
 Introduction In this experiment, you will use thin-film evaporator (TFE) to separate a mixture of water and ethylene glycol (EG). In a TFE a mixture of two fluids runs down a heated inner wall of a cylindrical
Introduction In this experiment, you will use thin-film evaporator (TFE) to separate a mixture of water and ethylene glycol (EG). In a TFE a mixture of two fluids runs down a heated inner wall of a cylindrical
Chapter 5: The First Law of Thermodynamics: Closed Systems
 Chapter 5: The First Law of Thermodynamics: Closed Systems The first law of thermodynamics can be simply stated as follows: during an interaction between a system and its surroundings, the amount of energy
Chapter 5: The First Law of Thermodynamics: Closed Systems The first law of thermodynamics can be simply stated as follows: during an interaction between a system and its surroundings, the amount of energy
CHAPTER 15: FEEDFORWARD CONTROL
 CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
Chemical Reaction Engineering Prof. JayantModak Department of Chemical Engineering Indian Institute of Science, Bangalore
 Chemical Reaction Engineering Prof. JayantModak Department of Chemical Engineering Indian Institute of Science, Bangalore Module No. #05 Lecture No. #29 Non Isothermal Reactor Operation Let us continue
Chemical Reaction Engineering Prof. JayantModak Department of Chemical Engineering Indian Institute of Science, Bangalore Module No. #05 Lecture No. #29 Non Isothermal Reactor Operation Let us continue
Plantwide Control of Chemical Processes Prof. Nitin Kaistha Department of Chemical Engineering Indian Institute of Technology, Kanpur
 Plantwide Control of Chemical Processes Prof. Nitin Kaistha Department of Chemical Engineering Indian Institute of Technology, Kanpur Lecture - 41 Cumene Process Plantwide Control (Refer Slide Time: 00:18)
Plantwide Control of Chemical Processes Prof. Nitin Kaistha Department of Chemical Engineering Indian Institute of Technology, Kanpur Lecture - 41 Cumene Process Plantwide Control (Refer Slide Time: 00:18)
where = rate of change of total energy of the system, = rate of heat added to the system, = rate of work done by the system
 The Energy Equation for Control Volumes Recall, the First Law of Thermodynamics: where = rate of change of total energy of the system, = rate of heat added to the system, = rate of work done by the system
The Energy Equation for Control Volumes Recall, the First Law of Thermodynamics: where = rate of change of total energy of the system, = rate of heat added to the system, = rate of work done by the system
Methodology for Analysis of Metallurgical Processes
 Methodology for Analysis of Metallurgical Processes Metallurgical and chemical processes are classified as batch, continuous and semibatch 1. Batch processes The feed is charged into a vessel at the beginning
Methodology for Analysis of Metallurgical Processes Metallurgical and chemical processes are classified as batch, continuous and semibatch 1. Batch processes The feed is charged into a vessel at the beginning
Overall Heat Transfer Coefficient
 Overall Heat Transfer Coefficient A heat exchanger typically involves two flowing fluids separated by a solid wall. Heat is first transferred from the hot fluid to the wall by convection, through the wall
Overall Heat Transfer Coefficient A heat exchanger typically involves two flowing fluids separated by a solid wall. Heat is first transferred from the hot fluid to the wall by convection, through the wall
Lecture Note for Open Channel Hydraulics
 Chapter -one Introduction to Open Channel Hydraulics 1.1 Definitions Simply stated, Open channel flow is a flow of liquid in a conduit with free space. Open channel flow is particularly applied to understand
Chapter -one Introduction to Open Channel Hydraulics 1.1 Definitions Simply stated, Open channel flow is a flow of liquid in a conduit with free space. Open channel flow is particularly applied to understand
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Basic Concepts in Data Reconciliation. Chapter 6: Steady-State Data Reconciliation with Model Uncertainties
 Chapter 6: Steady-State Data with Model Uncertainties CHAPTER 6 Steady-State Data with Model Uncertainties 6.1 Models with Uncertainties In the previous chapters, the models employed in the DR were considered
Chapter 6: Steady-State Data with Model Uncertainties CHAPTER 6 Steady-State Data with Model Uncertainties 6.1 Models with Uncertainties In the previous chapters, the models employed in the DR were considered
Rocket propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, Madras. Lecture 09 Theory of Nozzles
 Rocket propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture 09 Theory of Nozzles (Refer Slide Time: 00:14) Good morning. We will develop the
Rocket propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture 09 Theory of Nozzles (Refer Slide Time: 00:14) Good morning. We will develop the
Cryogenic Engineering Prof. M. D. Atrey Department of Mechanical Engineering Indian Institute of Technology, Bombay. Lecture No. #23 Gas Separation
 Cryogenic Engineering Prof. M. D. Atrey Department of Mechanical Engineering Indian Institute of Technology, Bombay Lecture No. #23 Gas Separation So, welcome to the 23rd lecture, on Cryogenic Engineering,
Cryogenic Engineering Prof. M. D. Atrey Department of Mechanical Engineering Indian Institute of Technology, Bombay Lecture No. #23 Gas Separation So, welcome to the 23rd lecture, on Cryogenic Engineering,
AAE COMBUSTION AND THERMOCHEMISTRY
 5. COMBUSTIO AD THERMOCHEMISTRY Ch5 1 Overview Definition & mathematical determination of chemical equilibrium, Definition/determination of adiabatic flame temperature, Prediction of composition and temperature
5. COMBUSTIO AD THERMOCHEMISTRY Ch5 1 Overview Definition & mathematical determination of chemical equilibrium, Definition/determination of adiabatic flame temperature, Prediction of composition and temperature
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Computation of Incompressible Flows: SIMPLE and related Algorithms
 Computation of Incompressible Flows: SIMPLE and related Algorithms Milovan Perić CoMeT Continuum Mechanics Technologies GmbH milovan@continuummechanicstechnologies.de SIMPLE-Algorithm I - - - Consider
Computation of Incompressible Flows: SIMPLE and related Algorithms Milovan Perić CoMeT Continuum Mechanics Technologies GmbH milovan@continuummechanicstechnologies.de SIMPLE-Algorithm I - - - Consider
Chapter Four fluid flow mass, energy, Bernoulli and momentum
 4-1Conservation of Mass Principle Consider a control volume of arbitrary shape, as shown in Fig (4-1). Figure (4-1): the differential control volume and differential control volume (Total mass entering
4-1Conservation of Mass Principle Consider a control volume of arbitrary shape, as shown in Fig (4-1). Figure (4-1): the differential control volume and differential control volume (Total mass entering
CHEMICAL ENGINEERING THERMODYNAMICS. Andrew S. Rosen
 CHEMICAL ENGINEERING THERMODYNAMICS Andrew S. Rosen SYMBOL DICTIONARY 1 TABLE OF CONTENTS Symbol Dictionary... 3 1. Measured Thermodynamic Properties and Other Basic Concepts... 5 1.1 Preliminary Concepts
CHEMICAL ENGINEERING THERMODYNAMICS Andrew S. Rosen SYMBOL DICTIONARY 1 TABLE OF CONTENTS Symbol Dictionary... 3 1. Measured Thermodynamic Properties and Other Basic Concepts... 5 1.1 Preliminary Concepts
The concept of equilibrium
 The concept of equilibrium Chemical reactions often involve a series of processes that may oppose each other. At some point the rate at which one process takes place will be equal to the rate at which
The concept of equilibrium Chemical reactions often involve a series of processes that may oppose each other. At some point the rate at which one process takes place will be equal to the rate at which
Detailed Derivation of Fanno Flow Relationships
 Detailed Derivation of Fanno Flow Relationships Matthew MacLean, Ph.D. Version. October 03 v. fixed a sign error on Eq. 5 ! My motivation for writing this note results from preparing course notes for the
Detailed Derivation of Fanno Flow Relationships Matthew MacLean, Ph.D. Version. October 03 v. fixed a sign error on Eq. 5 ! My motivation for writing this note results from preparing course notes for the
CHEE 222: PROCESS DYNAMICS AND NUMERICAL METHODS
 CHEE 222: PROCESS DYNAMICS AND NUMERICAL METHODS Winter 2017 Module 1: Introduction to Process Modeling Dr. Xiang Li 1 Module 1 Outline 1. Process and Model - Concepts of process and model - Classification
CHEE 222: PROCESS DYNAMICS AND NUMERICAL METHODS Winter 2017 Module 1: Introduction to Process Modeling Dr. Xiang Li 1 Module 1 Outline 1. Process and Model - Concepts of process and model - Classification
Examples of Applications of Potential Functions in Problem Solving (Web Appendix to the Paper)
") Examples of Applications of otential Functions in roblem Solving (Web Appendix to the aper) Ali Mehrizi-Sani and Reza Iravani May 5, 2010 1 Introduction otential functions may be exploited to formulate
Examples of Applications of otential Functions in roblem Solving (Web Appendix to the aper) Ali Mehrizi-Sani and Reza Iravani May 5, 2010 1 Introduction otential functions may be exploited to formulate
Chapter 4 Copolymerization
 Chapter 4 Copolymerization 4.1 Kinetics of Copolymerization 4.1.1 Involved Chemical Reactions Initiation I 2 + M 2R 1 r = 2 fk d I 2 R I Propagation Chain Transfer Termination m,n + k p m+1,n m,n + B k
Chapter 4 Copolymerization 4.1 Kinetics of Copolymerization 4.1.1 Involved Chemical Reactions Initiation I 2 + M 2R 1 r = 2 fk d I 2 R I Propagation Chain Transfer Termination m,n + k p m+1,n m,n + B k
Basic Procedures for Common Problems
 Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
SKMM 3023 Applied Numerical Methods
 UNIVERSITI TEKNOLOGI MALAYSIA SKMM 3023 Applied Numerical Methods Numerical Differentiation ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Numerical
UNIVERSITI TEKNOLOGI MALAYSIA SKMM 3023 Applied Numerical Methods Numerical Differentiation ibn Abdullah Faculty of Mechanical Engineering Òº ÙÐÐ ÚºÒÙÐÐ ¾¼½ SKMM 3023 Applied Numerical Methods Numerical
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Applications of Quantum Theory to Some Simple Systems
 Applications of Quantum Theory to Some Simple Systems Arbitrariness in the value of total energy. We will use classical mechanics, and for simplicity of the discussion, consider a particle of mass m moving
Applications of Quantum Theory to Some Simple Systems Arbitrariness in the value of total energy. We will use classical mechanics, and for simplicity of the discussion, consider a particle of mass m moving
Computer Aided Process Plant Design
 Computer Aided rocess lant Design Material Balance S. Balasubramanian Department of Chemical Engineering SRM University, Kattankulathur-603203 1 OUTLINE 1 Material Balance 2 Classification 3 Algorithm
Computer Aided rocess lant Design Material Balance S. Balasubramanian Department of Chemical Engineering SRM University, Kattankulathur-603203 1 OUTLINE 1 Material Balance 2 Classification 3 Algorithm
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
Virtual Work and Variational Principles
 Virtual Work and Principles Mathematically, the structural analysis problem is a boundary value problem (BVP). Forces, displacements, stresses, and strains are connected and computed within the framework
Virtual Work and Principles Mathematically, the structural analysis problem is a boundary value problem (BVP). Forces, displacements, stresses, and strains are connected and computed within the framework
NonlinearControlofpHSystemforChangeOverTitrationCurve
 D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems
 Journal of Automation Control Engineering Vol 3 No 2 April 2015 An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems Nguyen Duy Cuong Nguyen Van Lanh Gia Thi Dinh Electronics Faculty
Journal of Automation Control Engineering Vol 3 No 2 April 2015 An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems Nguyen Duy Cuong Nguyen Van Lanh Gia Thi Dinh Electronics Faculty
Energy Balances. F&R Chapter 8
 Energy Balances. F&R Chapter 8 How do we calculate enthalpy (and internal energy) changes when we don t have tabulated data (e.g., steam tables) for the process species? Basic procedures to calculate enthalpy
Energy Balances. F&R Chapter 8 How do we calculate enthalpy (and internal energy) changes when we don t have tabulated data (e.g., steam tables) for the process species? Basic procedures to calculate enthalpy
Introduction to Modelling and Simulation
 Introduction to Modelling and Simulation Prof. Cesar de Prada Dpt. Systems Engineering and Automatic Control EII, University of Valladolid, Spain prada@autom.uva.es Digital simulation Methods and tools
Introduction to Modelling and Simulation Prof. Cesar de Prada Dpt. Systems Engineering and Automatic Control EII, University of Valladolid, Spain prada@autom.uva.es Digital simulation Methods and tools
Feedback Basics. David M. Auslander Mechanical Engineering University of California at Berkeley. copyright 1998, D.M. Auslander
 Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
1 One-dimensional analysis
 One-dimensional analysis. Introduction The simplest models for gas liquid flow systems are ones for which the velocity is uniform over a cross-section and unidirectional. This includes flows in a long
One-dimensional analysis. Introduction The simplest models for gas liquid flow systems are ones for which the velocity is uniform over a cross-section and unidirectional. This includes flows in a long
Aeroelasticity. Lecture 9: Supersonic Aeroelasticity. G. Dimitriadis. AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 9
 Aeroelasticity Lecture 9: Supersonic Aeroelasticity G. Dimitriadis AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 9 1 Introduction All the material presented up to now concerned incompressible
Aeroelasticity Lecture 9: Supersonic Aeroelasticity G. Dimitriadis AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 9 1 Introduction All the material presented up to now concerned incompressible
1 Loop Control. 1.1 Open-loop. ISS0065 Control Instrumentation
 Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая
Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая
Chapter 9. Linear Momentum and Collisions
 Chapter 9 Linear Momentum and Collisions Momentum Analysis Models Force and acceleration are related by Newton s second law. When force and acceleration vary by time, the situation can be very complicated.
Chapter 9 Linear Momentum and Collisions Momentum Analysis Models Force and acceleration are related by Newton s second law. When force and acceleration vary by time, the situation can be very complicated.
CHAPTER 7 SEVERAL FORMS OF THE EQUATIONS OF MOTION
 CHAPTER 7 SEVERAL FORMS OF THE EQUATIONS OF MOTION 7.1 THE NAVIER-STOKES EQUATIONS Under the assumption of a Newtonian stress-rate-of-strain constitutive equation and a linear, thermally conductive medium,
CHAPTER 7 SEVERAL FORMS OF THE EQUATIONS OF MOTION 7.1 THE NAVIER-STOKES EQUATIONS Under the assumption of a Newtonian stress-rate-of-strain constitutive equation and a linear, thermally conductive medium,
work in air sealed outlet EXAMPLE: THERMAL DAMPING
 EXAMPLE: THERMAL DAMPING work in air sealed outlet A BICYCLE PUMP WITH THE OUTLET SEALED. When the piston is depressed, a fixed mass of air is compressed. mechanical work is done. The mechanical work done
EXAMPLE: THERMAL DAMPING work in air sealed outlet A BICYCLE PUMP WITH THE OUTLET SEALED. When the piston is depressed, a fixed mass of air is compressed. mechanical work is done. The mechanical work done
FUNDAMENTALS OF THERMAL ANALYSIS AND DIFFERENTIAL SCANNING CALORIMETRY Application in Materials Science Investigations
 FUNDAMENTALS OF THERMAL ANALYSIS AND DIFFERENTIAL SCANNING CALORIMETRY Application in Materials Science Investigations Analiza cieplna i kalorymetria różnicowa w badaniach materiałów Tomasz Czeppe Lecture
FUNDAMENTALS OF THERMAL ANALYSIS AND DIFFERENTIAL SCANNING CALORIMETRY Application in Materials Science Investigations Analiza cieplna i kalorymetria różnicowa w badaniach materiałów Tomasz Czeppe Lecture